
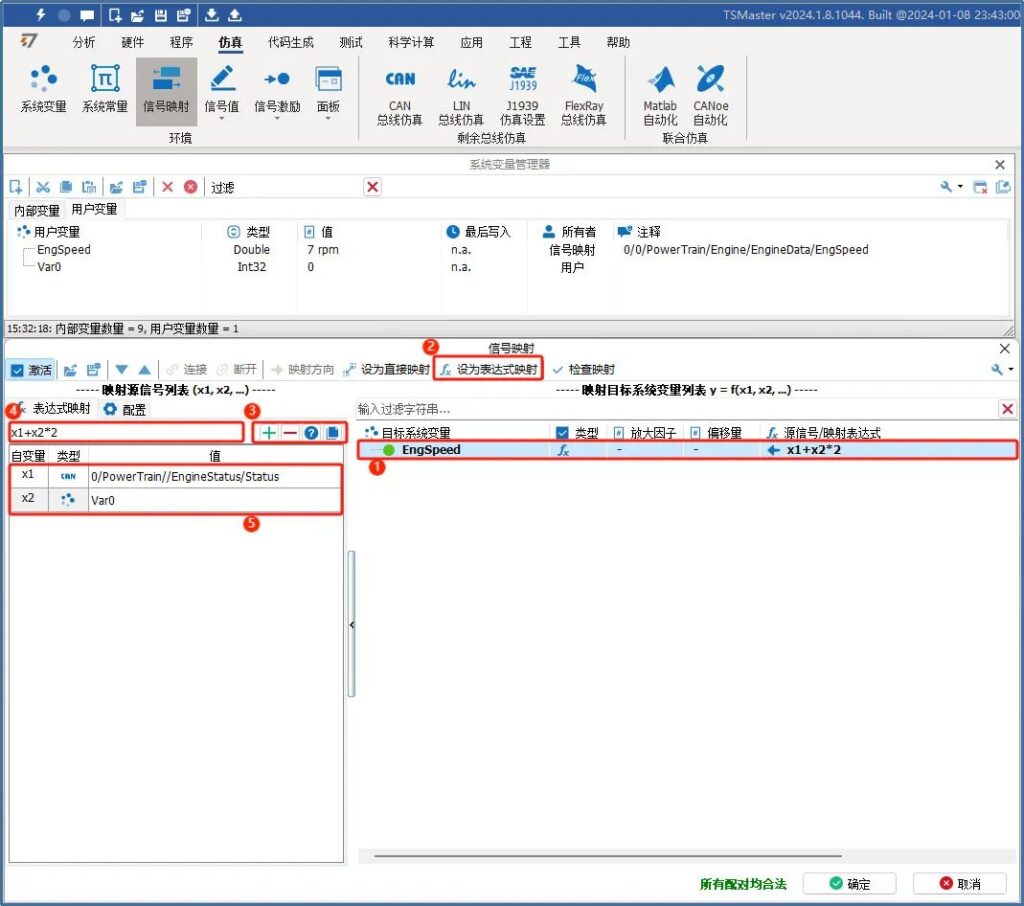
② Set to expression mapping
③ Click on the plus sign to add an independent variable
![]() : Add independent variables
: Add independent variables
![]() : Deletion of independent variables
: Deletion of independent variables
![]() : See help for arbitrary expressions
: See help for arbitrary expressions
![]() : C code that copies the current expression mapping
: C code that copies the current expression mapping
④ Edit calculation method expression
⑤ Assign values to the independent variables in the calculation expression. The independent variables can be selected from constants, system variables, FlexRay signals, CAN signals, and LIN signals.
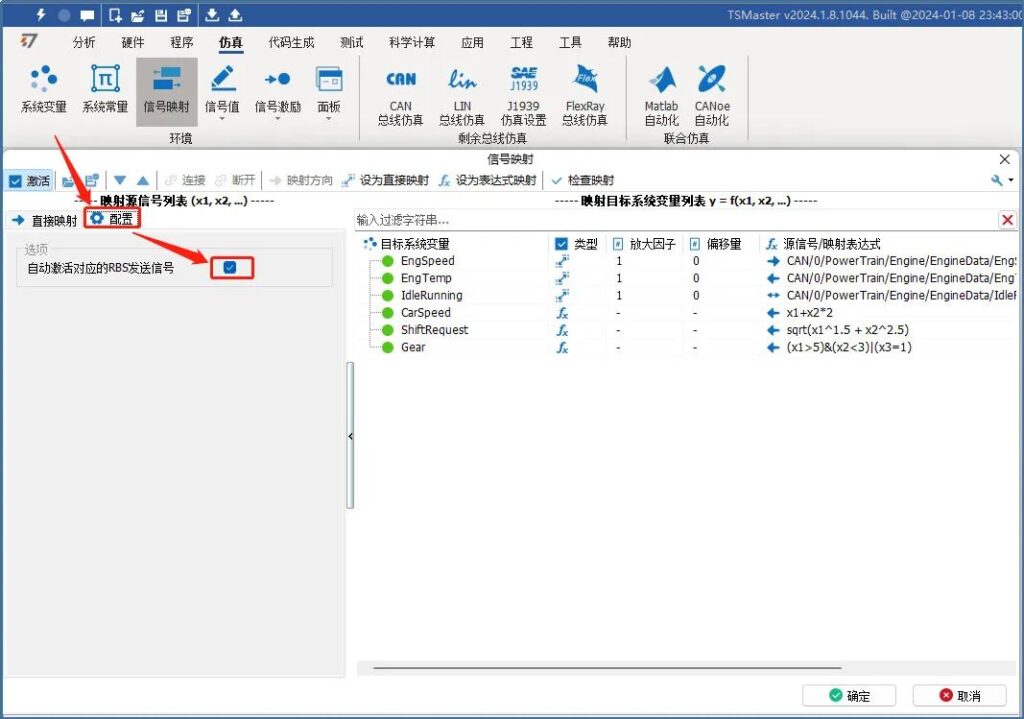
[Check mapping]:After completing the addition and configuration of the signal mapping list, you can choose to check the current mapping, which can avoid the situation of invalid mapping.
[Configuration]:Automatically activate the corresponding RBS transmit signal. The signals involved in the mapping list will be sent as RBS emulation after checking the box, as in Figure 6.